#include "main.h"
#include "i2c-lcd.h"
I2C_HandleTypeDef hi2c1;
TIM_HandleTypeDef htim1;
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_I2C1_Init(void);
static void MX_TIM1_Init(void);
void delay (uint16_t time)
{
__HAL_TIM_SET_COUNTER(&htim1, 0);
while (__HAL_TIM_GET_COUNTER (&htim1) < time);
}
uint32_t IC_Val1 = 0;
uint32_t IC_Val2 = 0;
uint32_t Difference = 0;
uint8_t Is_First_Captured = 0; // is the first value captured ?
uint8_t Distance = 0;
#define TRIG_PIN GPIO_PIN_9
#define TRIG_PORT GPIOA
// Let's write the callback function
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if (htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1) // if the interrupt source is channel1
{
if (Is_First_Captured==0) // if the first value is not captured
{
IC_Val1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); // read the first value
Is_First_Captured = 1; // set the first captured as true
// Now change the polarity to falling edge
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING);
}
else if (Is_First_Captured==1) // if the first is already captured
{
IC_Val2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); // read second value
__HAL_TIM_SET_COUNTER(htim, 0); // reset the counter
if (IC_Val2 > IC_Val1)
{
Difference = IC_Val2-IC_Val1;
}
else if (IC_Val1 > IC_Val2)
{
Difference = (0xffff - IC_Val1) + IC_Val2;
}
Distance = Difference * .034/2;
Is_First_Captured = 0; // set it back to false
// set polarity to rising edge
__HAL_TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
__HAL_TIM_DISABLE_IT(&htim1, TIM_IT_CC1);
}
}
}
void HCSR04_Read (void)
{
HAL_GPIO_WritePin(TRIG_PORT, TRIG_PIN, GPIO_PIN_SET); // pull the TRIG pin HIGH
delay(10); // wait for 10 us
HAL_GPIO_WritePin(TRIG_PORT, TRIG_PIN, GPIO_PIN_RESET); // pull the TRIG pin low
__HAL_TIM_ENABLE_IT(&htim1, TIM_IT_CC1);
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
lcd_init();
HAL_TIM_IC_Start_IT(&htim1, TIM_CHANNEL_1);
lcd_send_string ("Mesafe = ");
/* USER CODE END 2 */
while (1)
{
/* USER CODE END WHILE */
HCSR04_Read();
lcd_send_data((Distance/100) + 48); // 100th pos
lcd_send_data(((Distance/10)%10) +48); // 10th pos
lcd_send_data((Distance%10)+48); // 1st pos
lcd_send_string(" cm");
HAL_Delay(200);
}
/* USER CODE END 3 */
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief I2C1 Initialization Function
* @param None
* @retval None
*/
static void MX_I2C1_Init(void)
{
/* USER CODE END I2C1_Init 1 */
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000;
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN I2C1_Init 2 */
/* USER CODE END I2C1_Init 2 */
}
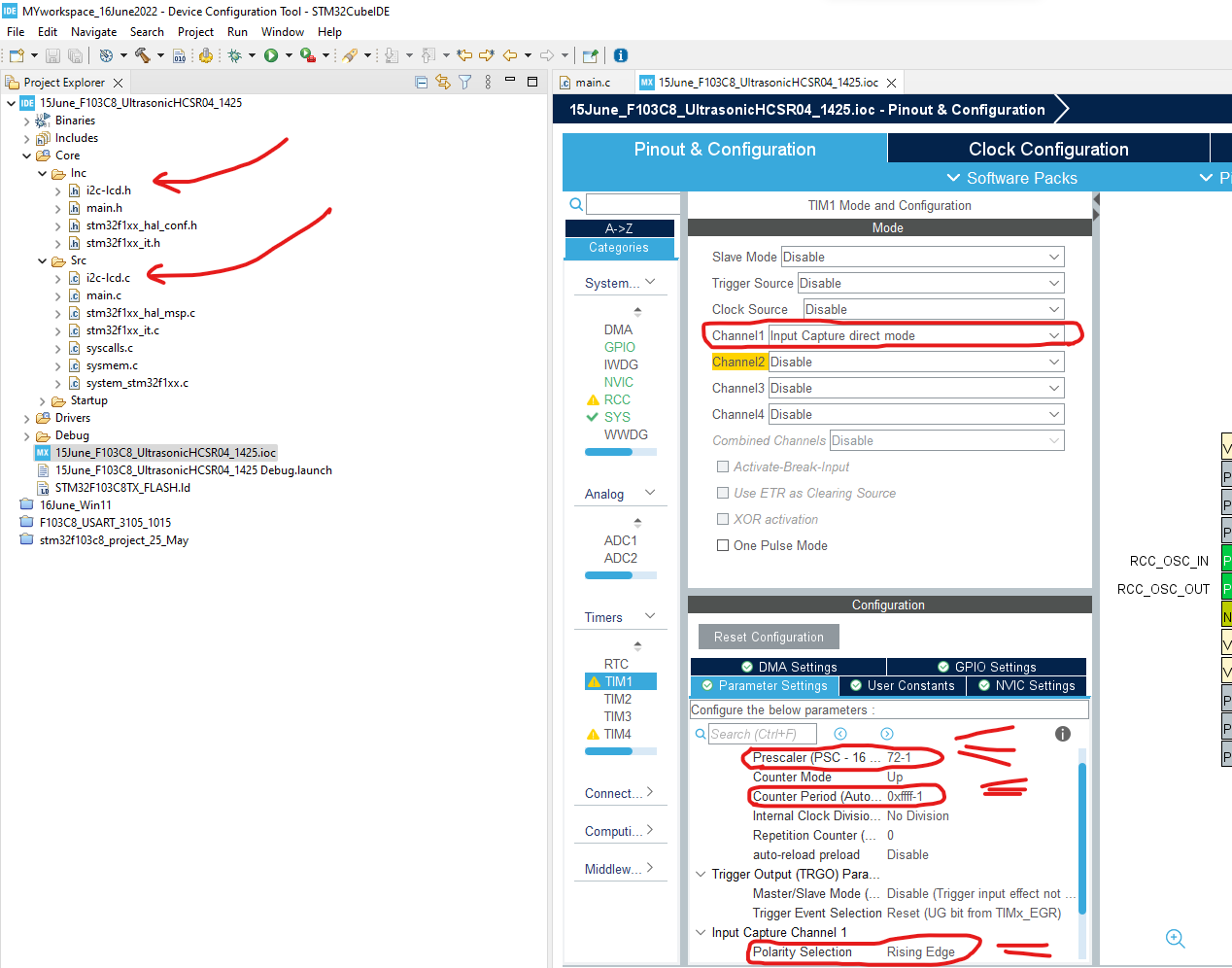
static void MX_TIM1_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
htim1.Instance = TIM1;
htim1.Init.Prescaler = 72-1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 0xffff-1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_IC_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim1, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_9, GPIO_PIN_RESET);
/*Configure GPIO pin : PA9 */
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀
😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀
i2c-lcd.c file :
/** Put this in the src folder **/
#include "i2c-lcd.h"
extern I2C_HandleTypeDef hi2c1; // change your handler here accordingly
#define SLAVE_ADDRESS_LCD 0x4E // change this according to ur setup
void lcd_send_cmd (char cmd)
{
char data_u, data_l;
uint8_t data_t[4];
data_u = (cmd&0xf0);
data_l = ((cmd<<4)&0xf0);
data_t[0] = data_u|0x0C; //en=1, rs=0
data_t[1] = data_u|0x08; //en=0, rs=0
data_t[2] = data_l|0x0C; //en=1, rs=0
data_t[3] = data_l|0x08; //en=0, rs=0
HAL_I2C_Master_Transmit (&hi2c1, SLAVE_ADDRESS_LCD,(uint8_t *) data_t, 4, 100);
}
void lcd_send_data (char data)
{
char data_u, data_l;
uint8_t data_t[4];
data_u = (data&0xf0);
data_l = ((data<<4)&0xf0);
data_t[0] = data_u|0x0D; //en=1, rs=0
data_t[1] = data_u|0x09; //en=0, rs=0
data_t[2] = data_l|0x0D; //en=1, rs=0
data_t[3] = data_l|0x09; //en=0, rs=0
HAL_I2C_Master_Transmit (&hi2c1, SLAVE_ADDRESS_LCD,(uint8_t *) data_t, 4, 100);
}
void lcd_clear (void)
{
lcd_send_cmd (0x80);
for (int i=0; i<70; i++)
{
lcd_send_data (' ');
}
}
void lcd_put_cur(int row, int col)
{
switch (row)
{
case 0:
col |= 0x80;
break;
case 1:
col |= 0xC0;
break;
}
lcd_send_cmd (col);
}
void lcd_init (void)
{
// 4 bit initialisation
HAL_Delay(50); // wait for >40ms
lcd_send_cmd (0x30);
HAL_Delay(5); // wait for >4.1ms
lcd_send_cmd (0x30);
HAL_Delay(1); // wait for >100us
lcd_send_cmd (0x30);
HAL_Delay(10);
lcd_send_cmd (0x20); // 4bit mode
HAL_Delay(10);
// dislay initialisation
lcd_send_cmd (0x28); // Function set --> DL=0 (4 bit mode), N = 1 (2 line display) F = 0 (5x8 characters)
HAL_Delay(1);
lcd_send_cmd (0x08); //Display on/off control --> D=0,C=0, B=0 ---> display off
HAL_Delay(1);
lcd_send_cmd (0x01); // clear display
HAL_Delay(1);
HAL_Delay(1);
lcd_send_cmd (0x06); //Entry mode set --> I/D = 1 (increment cursor) & S = 0 (no shift)
HAL_Delay(1);
lcd_send_cmd (0x0C); //Display on/off control --> D = 1, C and B = 0. (Cursor and blink, last two bits)
}
void lcd_send_string (char *str)
{
while (*str) lcd_send_data (*str++);
}
😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀
😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀😀
i2c-lcd.h file :
#include "stm32f1xx_hal.h"
void lcd_init (void); // initialize lcd
void lcd_send_cmd (char cmd); // send command to the lcd
void lcd_send_data (char data); // send data to the lcd
void lcd_send_string (char *str); // send string to the lcd
void lcd_put_cur(int row, int col); // put cursor at the entered position row (0 or 1), col (0-15);
void lcd_clear (void);

{kind=link}







Comments
Post a Comment